
The goal of our research is to improve mobility and function in individuals with neuromuscular and musculoskeletal disabilities through innovation in wearable robotics and control. We conduct laboratory experiments and develop musculoskeletal models and simulations to study the underlying mechanisms causing movement and orthopedic disorders. We then use the insight gained from these analyses to aid the design of robotic assistive devices and treatment strategies, which are subsequently evaluated and refined using experimental and computational methods. Our recent work has focused on designing lightweight and efficient hip and ankle exoskeletons to assist the elderly and individuals with cerebral palsy, stroke, spinal cord injury.

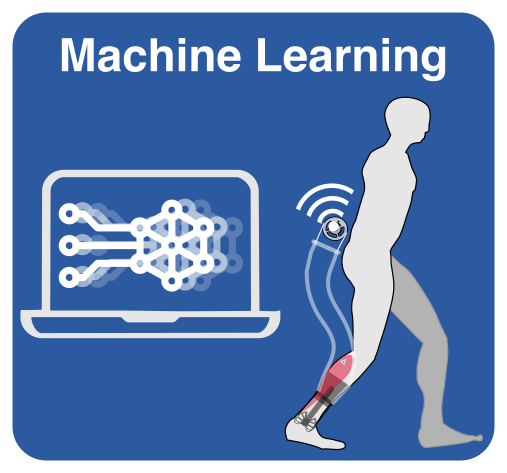


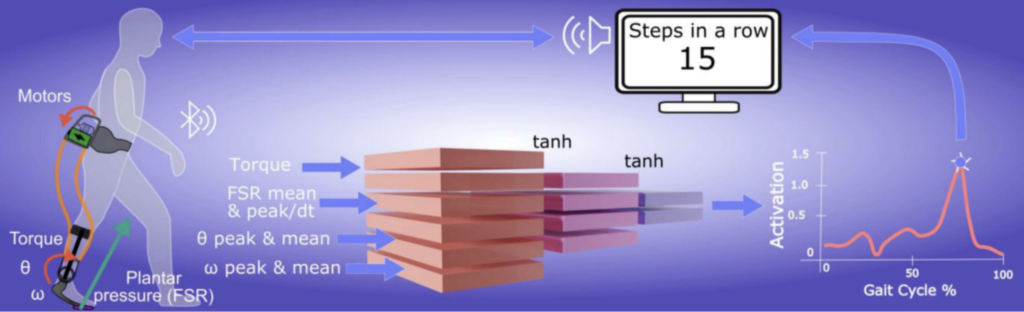
Machine Learning EMG Prediction
We developed and trained multilayer perceptrons (MLPs), a type of artificial neural network (ANN), utilizing features extracted exclusively from the exoskeleton’s onboard sensors, and demonstrated 85–87% accuracy, on average, in predicting muscle recruitment from electromyography measurements. Next, our participants completed a gait training session while receiving audio-visual biofeedback of their personalized real-time planar flexor recruitment predictions from the online MLP. We found that adding biofeedback to resistance elevated plantar flexor recruitment by 24 ± 16% compared to resistance alone.
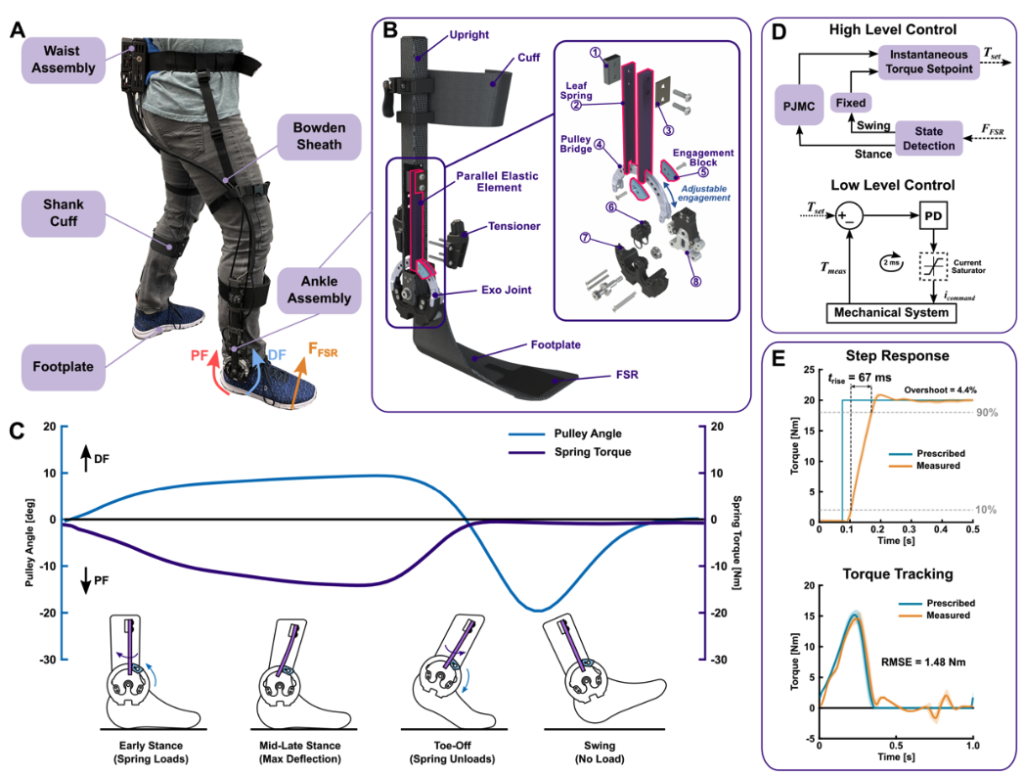
Parallel-Elastic Robotic Ankle
We designed a robotic ankle exoskeleton with a parallel elastic element in the form of a carbon fiber leaf spring that stored and returned energy in parallel to a cable-drive ankle joint during stance phase. When utilizing a controller designed to take advantage of the parallel spring torque, the number of assisted steps for the same battery capacity increased 46-76% compared to the no spring configuration depending on walking speed.
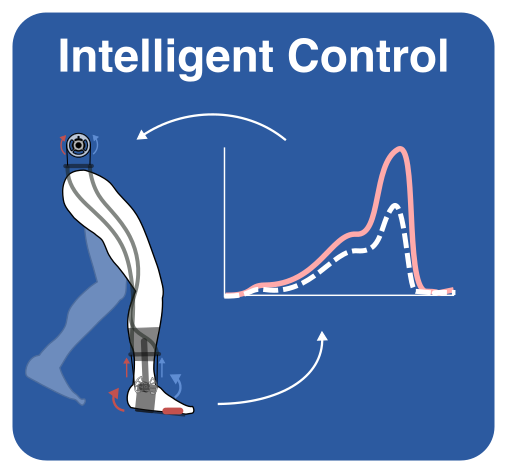
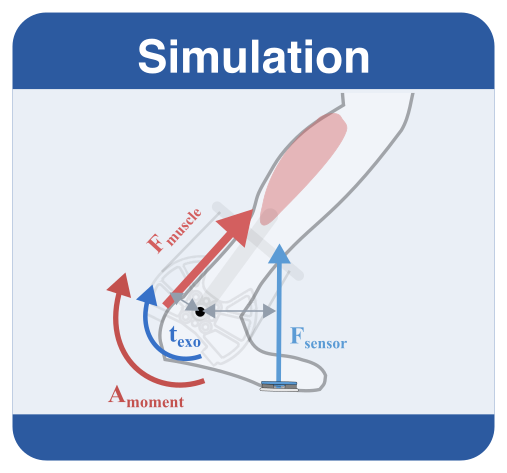
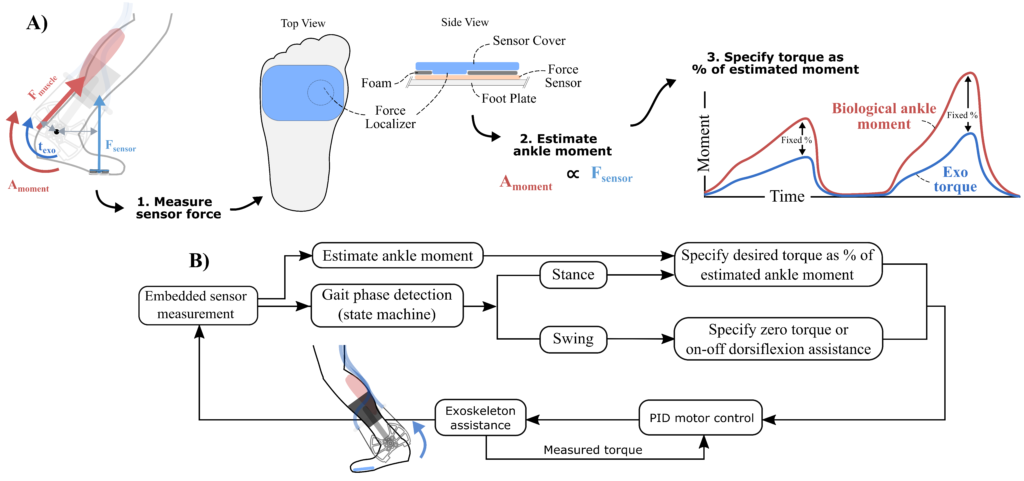
Bio-inspired adaptive control algorithms
Ankle exoskeletons hold potential to augment walking ability, yet their use in free-living environments has been limited by the absence of practical and effective control strategies that can appropriately adapt to variable terrain. To address this challenge, we derived a novel analytical ankle joint moment estimation model using custom wearable sensors and developed an exoskeleton control scheme to adapt assistance
proportional to the biological plantar-flexor moment in real-time.
Ultra low-profile powered hip exoskeleton
The purpose of this study was to design and validate a novel autonomous hip exoskeleton with a user-adaptive control strategy capable of reducing the energy cost of level and incline walking in individuals with and without walking impairment.

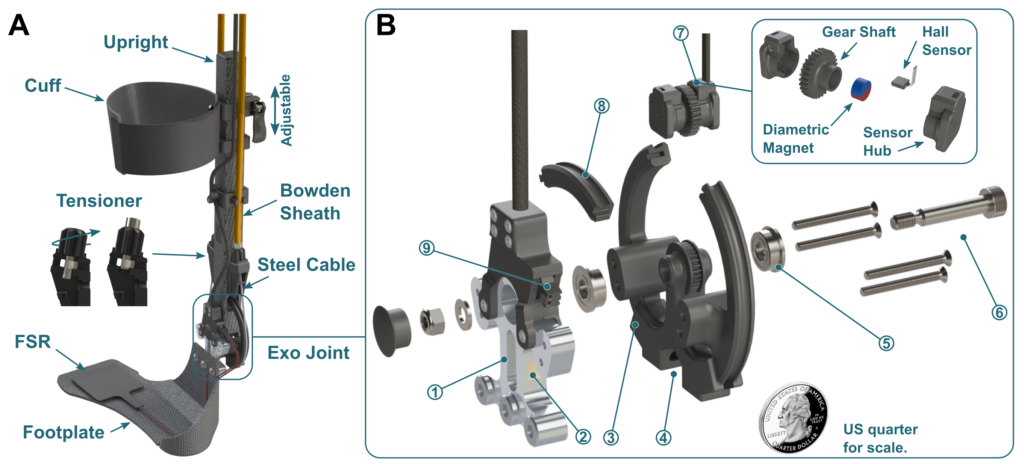
Robotic ankle exoskeleton design
Our goal for this project was to design and validate a lightweight untethered ankle exoskeleton that was effective across moderate-to-high intensity ambulation in children through adults with and without walking impairment.
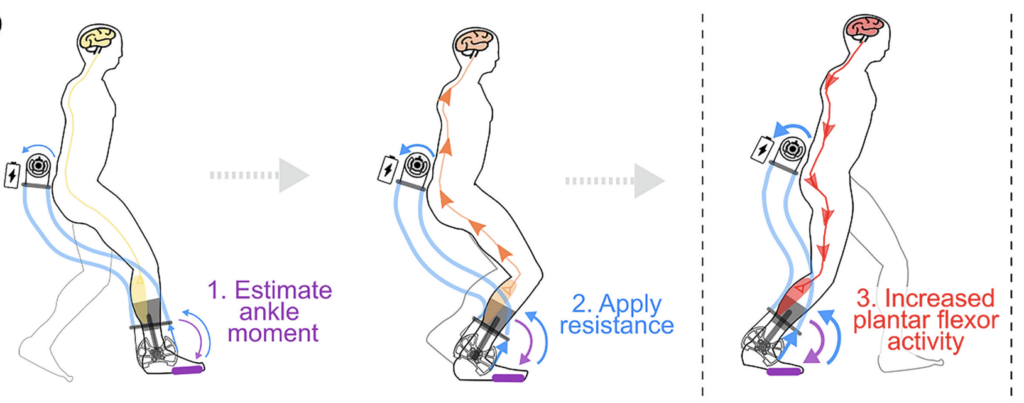
Functional ankle resistance training
The primary goal of this study was to develop and validate a targeted wearable robotic rehabilitation strategy to improve walking biomechanics and neuromuscular function via task-specific gait re-training.
Real-world exoskeleton testing / validation in free-living settings
The ability to readily complete challenging walking conditions is paramount to increasing and normalizing activities of daily living for ambulatory children and young adults with physical disabilities. Our overarching objective for this project is to augment mobility in challenging free-living settings for individuals with disabilities via ankle exoskeleton assistance.
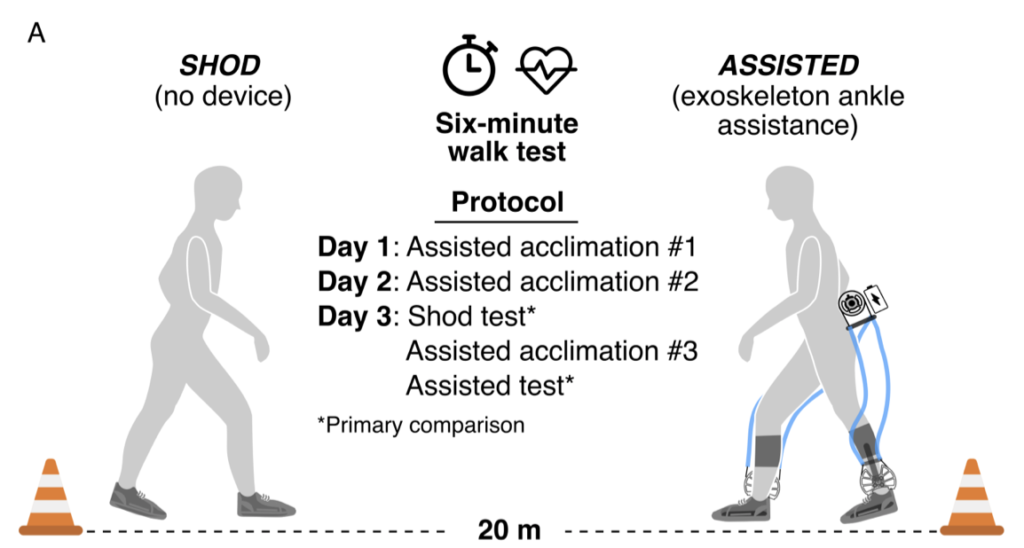
Clinical performance testing
Our long-term objectives are to design and clinically validate effective wearable robotic assistive devices for anyone with walking impairment from stroke, spinal cord injury, or cerebral palsy.
Biomechatronics Lab:
Our lab features state of the art equipment to design and manufacture wearable robotic devices.

Human Performance Lab:
Our human performance lab includes biomechanics equipment necessary to evaluate our devices and conduct clinical and non-clinical research studies, including an inclinable force measuring treadmill (Bertec), motion capture (Vicon), wireless EMG (Delsys), and portable metabolic testing equipment (Cosmed).
